
You Cannot Claim a Safe System Without This
Control at the boundary. Correction over time. Without both, “safe” is just a story.
By Chris Ciappa
Founder & Chief Coherence Architect
Samirac Partners
With regard to “safe AI systems.”
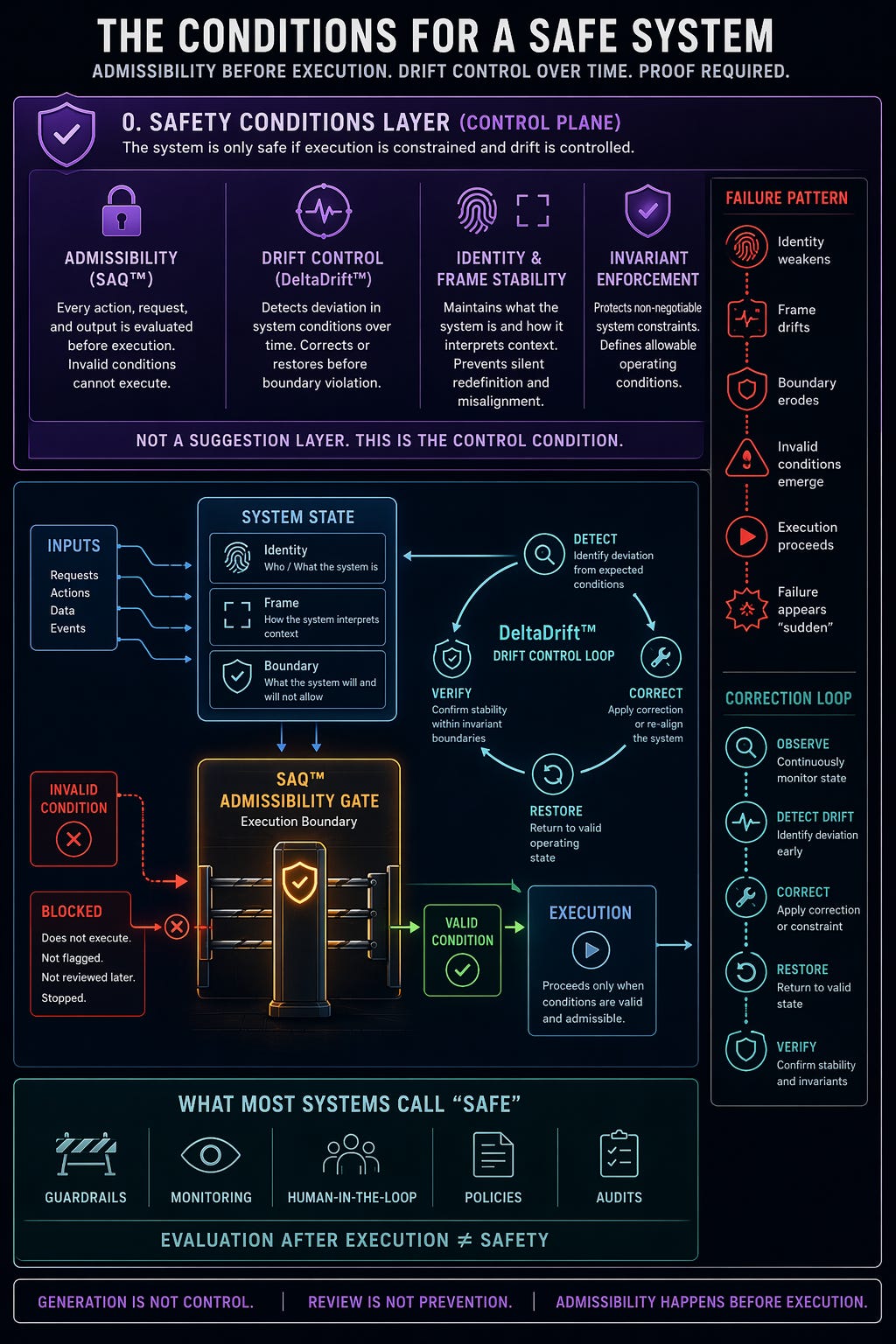
Guardrails. Policies. Monitoring. Human-in-the-loop. Audits.
It all sounds responsible.
But most of it shares the same flaw:
It evaluates safety after the system has already acted.
That’s not safety.
That’s review.
Safety Is Not About Outputs
Most systems today are evaluated like this:
Did the model respond correctly?
Did the agent follow instructions?
Did anything obviously go wrong?
That’s all output-level thinking.
But failure doesn’t originate at the output.
It originates earlier—at the level of system state.
And if the system is allowed to enter an invalid state, what it produces afterward is just a matter of time.
Where Failure Actually Begins
Every coherent system—AI, organization, institution, even a person—follows the same structure:
Identity → Frame → Coherence Boundary → Drift → Correction
Identity defines what the system is
Frame defines how it interprets reality
The Coherence Boundary defines what is allowed
This is where the control lives:
SAQ™ enforces the Coherence Boundary (admissibility at execution)
DeltaDrift™ governs drift detection and correction over time
When identity is stable, the system knows what it is.
When frame is stable, it interprets reality correctly.
When the boundary is enforced, it operates within valid states.
When those weaken, drift begins.
And when drift is ignored, failure shows up later and looks “sudden.”
It never is.
What “Safe” Actually Means
Strip everything else away, and it comes down to this:
A system is only safe if it cannot act from an invalid state.
Not:
“it usually behaves well”
“it passed evaluations”
“we review it after the fact”
But:
Execution is not possible unless the system is in a valid, admissible state.
That’s the standard.
SAQ™ — Admissibility at the Execution Boundary
This is the first requirement.
Before anything is allowed to execute:
the system’s state must be valid
the action must be admissible
required constraints must be satisfied
If not:
it does not proceed.
Not flagged.
Not reviewed later.
Not “we’ll catch it downstream.”
Stopped.
This enforces correctness at the boundary. It does not guarantee the system remains correct.
Plain Example
If your truck won’t start unless it’s in Park…
That’s control.
If it warns you it’s not in Park—but still starts anyway…
That’s a suggestion.
A lot of AI “safety” today is the second one.
Looks good. Sounds good.
Still lets the system move when it shouldn’t.
But That Still Isn’t Enough
Even if a system enforces admissibility in the moment…
It can still drift.
And drift is not hypothetical.
It’s the default.
DeltaDrift™ — State-Based Drift Detection & Correction
Systems don’t usually fail in one big moment.
They fail when state deviates without being detected or corrected.
They drift:
context shifts
assumptions change
small deviations accumulate
what was valid yesterday slowly becomes invalid today
And the system keeps operating… because nothing forces correction.
Until one day it crosses a boundary.
And everyone says:
“That was unexpected.”
It wasn’t.
It just wasn’t detected or corrected early enough.
Drift is not a timing issue. It is a state integrity issue.
Country Boy Version
You don’t end up in the ditch because of one sharp turn.
You get there because you kept drifting a little left…
…then a little more…
…then a little more…
And nobody corrected yer drift.
Most Systems Today Fail One of These
No admissibility → system can act when it shouldn’t
No drift control → system becomes unsafe over time
And here’s the uncomfortable truth:
Many systems that look “safe” today are already drifting.
They just haven’t hit the wall yet.
The Drift Stack™ Solves Both
Not by adding more guardrails.
Not by improving outputs.
But by controlling the system where failure actually begins:
Identity anchoring — prevents silent redefinition of what the system is
Frame stability — prevents misinterpretation of reality
Coherence boundary enforcement (SAQ™) — prevents invalid states from executing
State-based drift detection and correction (DeltaDrift™) — prevents valid systems from becoming invalid over time
Together:
The system cannot act incorrectly now…
and it cannot become incorrect later without being corrected.
The Missing Requirement: Proof
This is where almost every claim falls apart.
Not:
architecture diagrams
policy documents
vendor assurances
But:
Demonstrated behavior in operation
Show that:
invalid states cannot execute
drift is detected before failure
correction occurs before boundary violation
If you can’t demonstrate it…
you don’t have safety.
You have a story.
The Standard
If a system:
does not enforce admissibility before execution
does not control drift over time
cannot demonstrate both in operation
Then it should not be described as safe.
Final Thought
Most “safe AI” tries to control behavior.
The Drift Stack™ controls state.
And if you don’t control the state…
you don’t control the system.
The Only Question That Matters
The architecture is already defined.
Drift Stack™ Architecture
https://www.samirac.com/drift-architecture
Now ask yourself:
👉 Does my system control what’s allowed at execution —
or does it just react and hope it gets it right?
Architecture Demos
https://www.samirac.com/daisy-demos
Share This Article
If you found this article valuable, share it.
Substack automatically gives every subscriber a personal referral link. When someone subscribes through your share link, it counts toward referral rewards.
Current rewards:
• 3 referrals → 1 month of paid access
• 5 referrals → 6 months of paid access
• 10 referrals → 12 months of paid access
You can share directly using the Share button on this article, or find your personal referral link here:
By Chris Ciappa
Founder & Chief Coherence Architect
Samirac Partners